Usage
>> ddsampling [ direction | fastperiod | slowperiod | fastthreshold | slowthreshold ]
Security
Open.Description
Sets and returns information about the directional dependent sampling mode. These settings are used only if the sampling mode = ddsampling. This mode is intended for use when the instrument is integrated into a moving platform.- direction[ = ascending | descending] indicates when the instrument is sampling at the fast rate.
- fastperiod[ = <period>] has the same meaning as the period value in the sampling command, but applies only when the logger detects that it is moving in the preferred direction. This must be shorter than the provided slowperiod parameter.
- slowperiod[ = <period>] has the same meaning as the period value in the sampling command, but applies only when the logger detects that it is not moving in the preferred direction. This must be longer than the provided fastperiod parameter.
- fastthreshold[ = <dbar>] sets the boundary, based on the previous profile, where the logger should switch to the fast period sampling. The minimum precision is 0.1dBar and value should be greater than 0.
- slowthreshold[ = <dbar>] sets the boundary, based on the current profile, where the logger should switch to the slow period sampling. The minimum precision is 0.1dBar and value should be greater than 0.
The directional dependent sampling mode relies on the logger profiles detection scheme (see Profile detection events generation). Therefore, it is intended only for vehicles that profile overall pressure changes greater than 3 dbar.
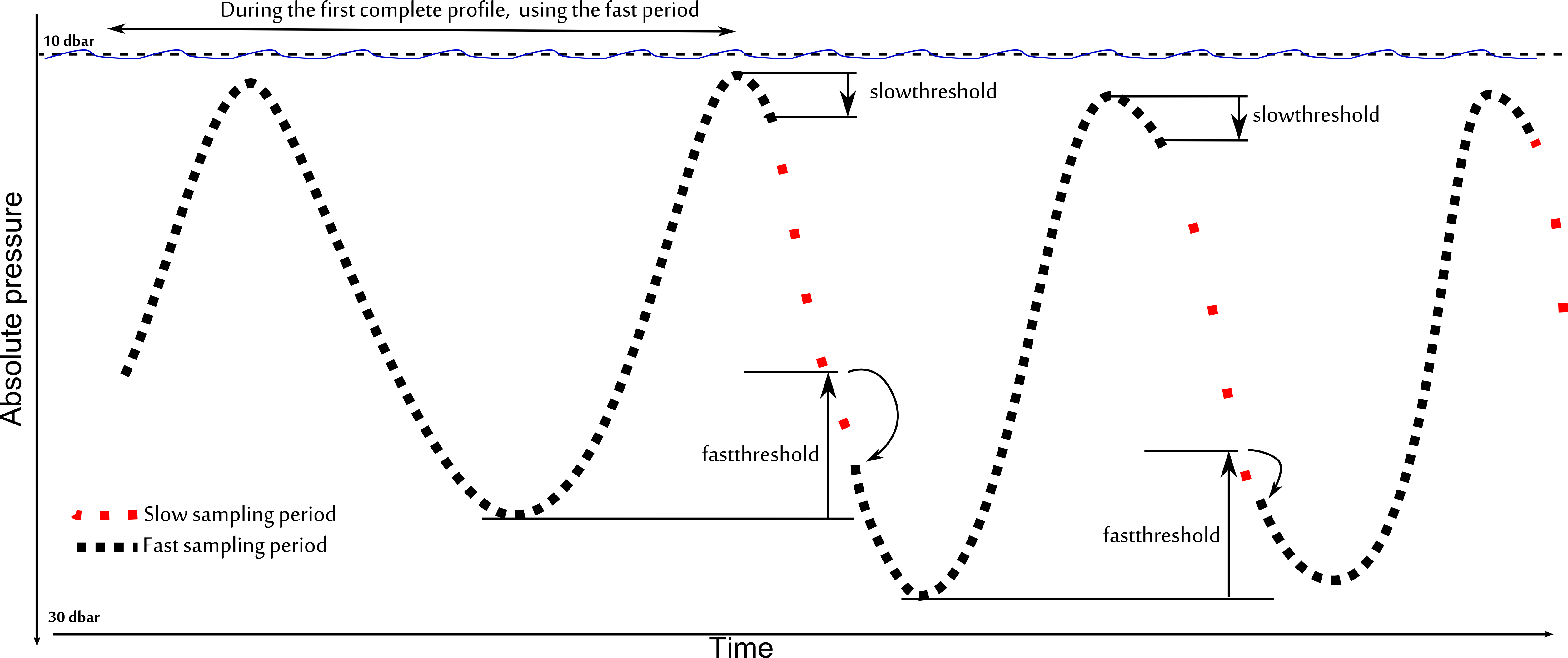
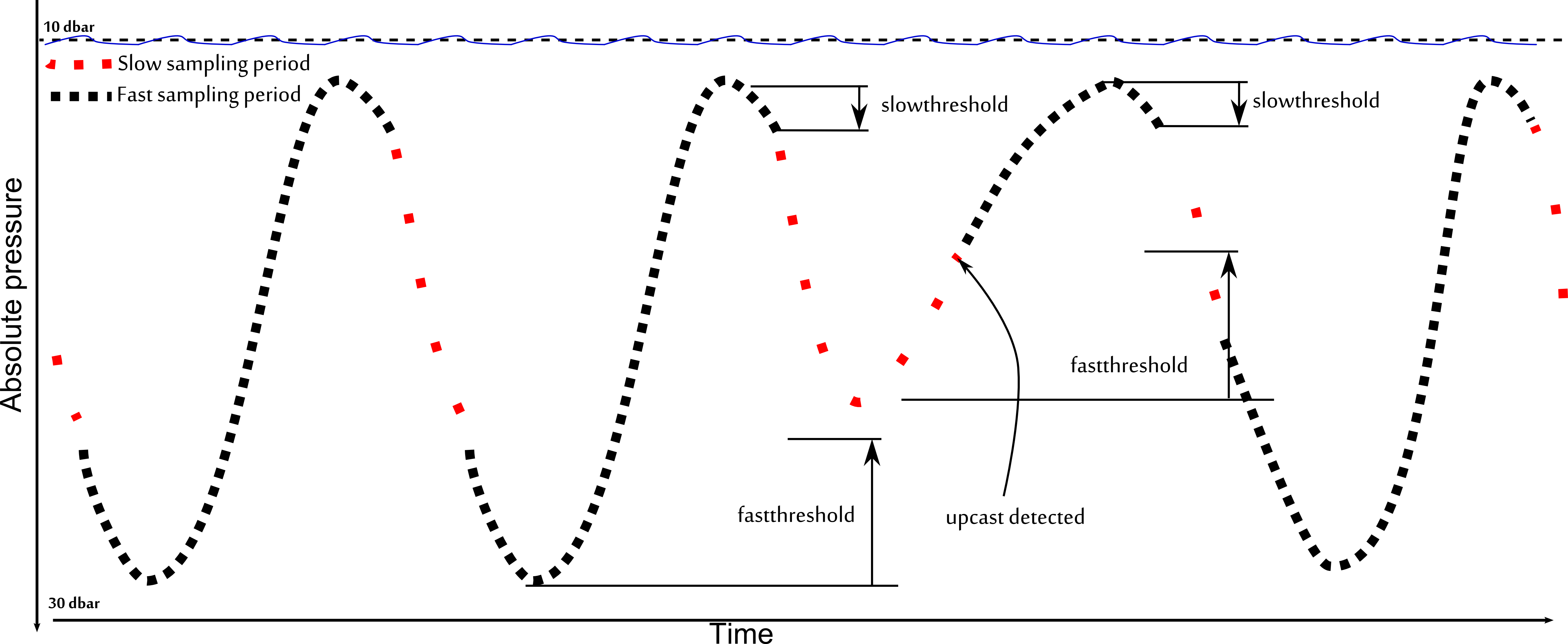
If the direction is set to ascending and an upcast is detected while sampling at the slow period, the logger will revert to the fast sampling period even if the threshold has not been crossed (and vice versa if the direction is set to descending). See the following example.
In order to configure the logger to maximize deployment life without compromising data in the preferred direction, the following guidelines can be used:
- fastthreshold should be greater than maxspeed x (slowperiod + modetransitiontime) + maxprofilevariation where:
- modetransitiontime is the sum of latency and readtime as reported by the channels command, plus one second (blanking period while switching sampling rate).
- maxspeed is the maximum speed of the vehicle along the depth axis.
- maxprofilevariation is the maximum variation in dbar from one profile to another.
- slowthreshold should be greater than the looping effect the vehicle might endure during its ascent (or descent).
Examples
>> ddsampling
<< ddsampling direction = ascending, fastperiod = 167, slowperiod = 1000, fastthreshold = 5.0, slowthreshold = 1.6
The following picture gives a global overview of how the logger would behave with the previous example on a 20 dbar profile setup after it has been started.
The next picture shows how the directional dependent sampling would behave in the case of a profile much shorter than the previous one. In such a case the logger would detect an upcast while slow sampling and would then go back to the fast sampling mode.
Errors
Error
E0105 command prohibited while logging
Settings may not be modified while logging is in progress; reading them is permitted.
Error
E0108 invalid argument to command: '<invalid-argument>'
The command was given with an argument which is unrecognized or has an invalid value; for example "ddsampling direction = horizontal", or "ddsampling fastthreshold= 0.0".
Error
E0109 feature not available
An attempt was made to use a feature which the logger is not configured to support.